Home > ニュースレター バックナンバー >ニュースレター44号 > 東京電機大学工学部電気電子工学科電子光情報コース協調ロボティクス研究室 研究室紹介
東京電機大学工学部電気電子工学科電子光情報コース
協調ロボティクス研究室 研究室紹介
東京電機大学工学部 准教授 五十嵐 洋
研究室ホームページ: http://www.crl.epi.dendai.ac.jp
1.研究室の概要
本研究室は協調をキーワードに,ヒト・ロボット・センシングの つながりに関する研究を行っています. 協調を新しい知能と捉えて,人間社会の役に立つ新しい技術の創出を目指します.

図1: ヒトの技能の階層化

図2: 知能の階層モデル
近年,科学技術の発展により,賢く役に立つロボットの期待が高まっています. しかし,人工知能に代表される賢さに関する研究も,まだまだヒト(設計者)の想定を越えることは難しいと考えます. そこで,柔軟なヒトの知能に学び,その知能を活かすアプローチが盛んに研究されています. しかし,賢さを構成する要素は様々であり,何ができれば賢いか?という問題は研究者ごとに異なっているのが現状です.
ここで,ヒトのスキル(技能)を整理して図1のように階層的に並べてみます. 実はこの階層の順番が重要なポイントで,上に位置するほどヒトにとって直観的,逆に下に行くほど人が苦手で負担が大きいスキルと考えることができます. 同様の階層でロボットの人工知能を並べると,面白いことにちょうど,得意不得意が上下反転します(図2). つまり,ヒトが苦手なことが実はロボットが得意で,ロボットが苦手なことがヒトにとって得意であるといえます.
このように考えると,ヒトとロボットがどのように協力すればよいかが見えてきます. つまり,ヒトとロボットが,それぞれ得意な部分を役割分担すれば,ヒトとロボットのペアは高いパフォーマンスを発揮できそうです. これが人間機械系とよばれるヒトと機械(ロボット)の協調を研究する一つの意義であると私たちは考えます.
しかし,ここで2つの問題が生じます. 1つは,ロボットが行う動作(サポート)がヒトにとって大きなお世話になってしまうことが,しばしば起こることです. ロボット(正確にはロボット設計者)が良かれと思ってアシストをヒトに与えても,結果的に邪魔をしてしまう可能性は捨てきれません. そして2つ目は,ヒトの熟達の問題です.特に初心者はミスを起こす可能性が高いと考えられます. さらに,時間とともに熟達が進むに連れて,操作特性が変化します. ロボットにとってサポート対象の行動パターンが変化してしまうことは,非常に問題を難しくしてしまっていると言わざるを得ません.

図3: 本研究室の主な研究トピックス
本研究室では,このような問題の解決の糸口として,「協調」が挙げられると考えます. つまり,ヒトがどのような意図をもっているか?どのような特性で操作しているかを察して, さらに自分の行動が他者に及ぼす影響を予想しながらアシストを実行する能力です. 実は,協調はロボットからヒトへのほかにも,図3のようにロボット同士の協調作業やヒト同士のチームワーク支援などにも応用が 可能な概念です.この協調できる能力をいかにしてロボットに理解させ,役立たせるかが本研究室のチャレンジです.
2.研究紹介
2.1 サブリミナルキャリブレーションによる機械操作熟達支援

図4: サブリミナルキャリブレーションのイメージ

図5: 実験および結果
ヒトが介在する機械操作において,初心者のミスを低減し,高いパフォーマンスを発揮できるようアシストするための研究が数多く行われています. しかし,時としてアシストが大きなお世話となり競合を引き起こし,さらに初心者の熟達の機械を奪う可能性があることが問題となります. そこで,本研究はヒトの学習熟達能力を考慮した新しいアシストの手法サブリミナルキャリブレーションを提案しています.
ヒトが思い通りにロボットを操作できる状態とは,その操作者が脳内に構築したロボットの挙動イメージと実際のロボットの挙動が一致している状態と考えます. わかりやすく言えば,「このくらいジョイスティックを倒せば,きっとロボットはこのくらい動くだろう」という予想が十分に当たる状態です. このように考えると,ヒトの操作熟達とは,操作対象のロボットの挙動を正しく予想できるようにイメージを修正する過程であると考えることができます. そこで,ヒトのイメージに近づけるようにロボットの挙動(ダイナミクス)を修正すればきっと熟達を促進できると考えました.
実験では,ロボットを使って目標を追従する作業で,その誤差が小さくなる(イメージ通り動かせる)ようにロボットのダイナミクス特性の修正を行いました. しかし,熟達の促進どころか,むしろ操作の邪魔となっていることがわかりました. この理由として,操作者がお手本としているロボットの特性が刻一刻と変わってしまうことで,熟達が進まなかったと考えられます.
そこで,このロボット特性の変化をヒトに気づかれないように(サブリミナルに)実行するという着想に至りました. 実験の結果,操作者はロボットの変化に気づいていないにもかかわらず,その操作精度を向上できることを実験により確認しました. この手法は,ロボット遠隔操縦のみでなく,義手や義足などの福祉機器を短時間で思い通りに操れるようにできる技術であると考えています.
2.2 協調作業における気づかいの定量化
従来の人間機械系研究の多くは単独の操作者の操作性や操作パフォーマンスのアシストを目的としたアプローチが一般的でした. つまり個人技能の改善に特化していたといえます. 本研究では,個人技能のみでなく集団技能,すなわちチームワークを改善・促進するためのアシストの枠組みを提唱しています.
これまでにも,スポーツや教育分野でチームワークに関する数多くの研究・調査が行われてきました. しかし,これらの知見は,言語的なコミュニケーションを中心にアンケートなど主観的な評価に基づくものが多く,ロボットへの工学的な応用が困難でした. そこで本研究では,このようなチームワークの因子として「気づかい」を定量的に評価する手法を提案しています.

図6:気づかいの定量化

図7: 実験の様子
ここで,「気づかい」は,単独作業では入力し得なかった,協調作業のみで発現する操作入力量として定義します. 「気づかい」という日本語は,一般に他者を助ける印象が強いですが,本研究ではあくまで操作量の違いと定義します. これにより,例えば上手な操作者に迎合して手抜きをすることも,結果的に他の操作者の邪魔となることも,すべて「気づかい」とい見なします.
我々の興味は,どれだけ「気づかい」を発揮しているか,ということではなく,この「気づかい」のバランスと集団作業のパフォーマンスにどのような関係があるかということです. 先行研究から,必ずしも「気づかい」が大きければ高いパフォーマンスを発揮するとは限らないことが示唆されています.
実験では,全被験者に協調作業の前に単独で作業を行ってもらい,その時の操作入力パターンをニューラルネットワークにより学習します. その後,複数の被験者によって協調作業をしてもらい,先に学習した単独操作モデルを用いて,この操作者は単独作業ではどのような操作入力したかを逐次予測します. この予測値と実際に協調作業で入力した操作量の差が,本研究で定義した「気づかい」です. 現在,いくつかの実験でこの「気づかい」のバランスと協調作業パラ―マンスの間に相関性が示唆されています.
2.3 複数台ロボットの社会的協調理論
安価なロボットでも多数で上手に協調できれば,高価で高機能な1台のロボットを超えるパフォーマンスが期待できるのではないか? ロボット間の協調ではそのような可能性を追究しています. ここで,ポイントとなるのは1台1台のロボットには必要最小限の能力(限られた視野範囲のセンサ・通信機能と移動能力)しか有しないことを前提とします.
一般に,複数の単純なロボットによる協調問題の枠組みはマルチエージェントシステム(Multi Agent System)よばれ,古くから研究が行われています. ここで,上述した必要最小限の機能を有するロボットをエージェントとよび,それぞれのエージェントの動作アルゴリズムをどのように設計するかがカギとなります.

図8:協調捕獲問題設定
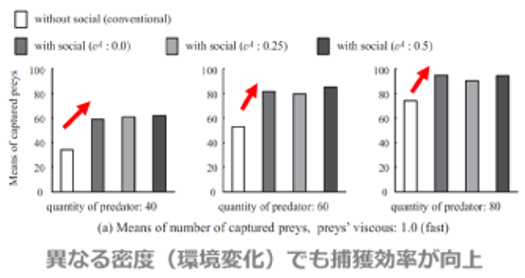
図9: 実験の様子
マルチエージェントシステムの制御アルゴリズムとして,社会性昆虫とよばれるアリやハチを模した手法があります. このような昆虫は,視線淘汰により適した個体が生き残ることで,より環境に適した集団を形成することが知られています. しかし,何世代にもわたる交配を必要とし,効率の点で問題があると本研究では考えます.
そこで,本研究室では,そのとき“たまたま”上手に作業をできているエージェントの戦略を模倣する社会的協調理論を提唱しています. これは人間社会における憧れや流行,同調,迎合などから得た発想です. 社会的協調理論により,昆虫のような世代交代のロスを低減し,より効率的な環境適応が期待できます. 本研究では,まず多数の餌(被捕食エージェント)を多数の捕食者エージェントにより囲い込む協調捕獲問題に取り組み,模倣を軸とした社会的協調理論の環境適応能力を確認しました.