- はじめに
日本の製造業においては,生産拠点の海外移転による産業の空洞化が産業集積地域に深刻な影響を与え,
特に,これまで製造業を支えてきた基盤的技術産業において熟練技能の衰退が懸念されています.
また,高齢社会の到来,若者の製造業離れの社会現象により,後継者難などが生じ,日本の製造業の将来に危機的状況となってきています.
今後も高付加価値製品設計・製造を行うためには,基盤技術や熟練技能の伝承,および知識の創出が不可欠となっています.
このような背景のもと,著者らは,国内有数の産業集積地域である埼玉県川口市の鋳物関連企業の協力を得て,
マルチメディアとバーチャルリアリティ(VR: Virtual Reality) 技術を応用した鋳造技能伝承と知識創出のための枠組みとこの枠組みに沿った熟練技能伝承システムを提案および実証を行ってきています.
効率的な技能伝承,知識創出を行うためには,鋳造に関わる知識の体系化やその知識を効果的に呈示する必要があります.
このため,マルチメディア技術を利用して形式知と暗黙知とをうまく連携した形で効率的に獲得できるようにしています.
また,鋳造技能の獲得には,視覚的な体験だけでなく,工具や製品の重量感や触り心地,音,臭い,色,
温度などのような感覚を作業者自身で体験することが重要です.また,工具や製品の重量感や触り心地などを複数の技能者間のコミュニケーションをま じえ体験することも重要なことです.
技能などの暗黙知の内面化については,VR技術と力覚呈示装置を利用して,実際の現場作業の視覚・力覚に関する疑似体験を通じ獲得することのできるシステムを開発してきています.
そこで本稿では,マルチメディア技術とVR技術などを応用した技能伝承と知識創出法について述べます.
特に,VR技術を用いた立体視システムとロボット技術を用いた力覚呈示装置を連携して使用することで視覚的な効果のみならず鋳造技能における力覚を技能者間のコミュニケーションをまじえて体得することが可能なシステムについて述べます.
- 鋳造技能の伝承と知識創出
現在,埼玉県にある鋳物関連企業と連携して,高度な技能,高品質,
短納期などが要求されている単品鋳物製造の技能伝承および知識創出を取り上げ,本熟練技能伝承システムの有用性について検討しています.
図1に示すような鋳造工程においては,製造のための知識として技術などの形式知のほかに技能などの暗黙知が必要となり,
高付加価値の鋳造品を製造するためには,これらの形式知と暗黙知をうまく連携して技術・技能を体得することが必要です.
図2は本システムの活用をSECI(Socialization, Externalization, Combination, Internalization:組織的知識創造)モデルの知識変換プロセスに対応させたものです.
OJT(On-the-JobTraining:職場内訓練)や現場作業を通じて,問題意識を明確化し,本システムの活用により技術データや映像などから形式知と暗黙知を連携した形で獲得し,
共同化→表出化→連結化→内面化のプロセスにより,短期間で熟練技能伝承および知識創出が可能になります.

図1 主な鋳造作業 |
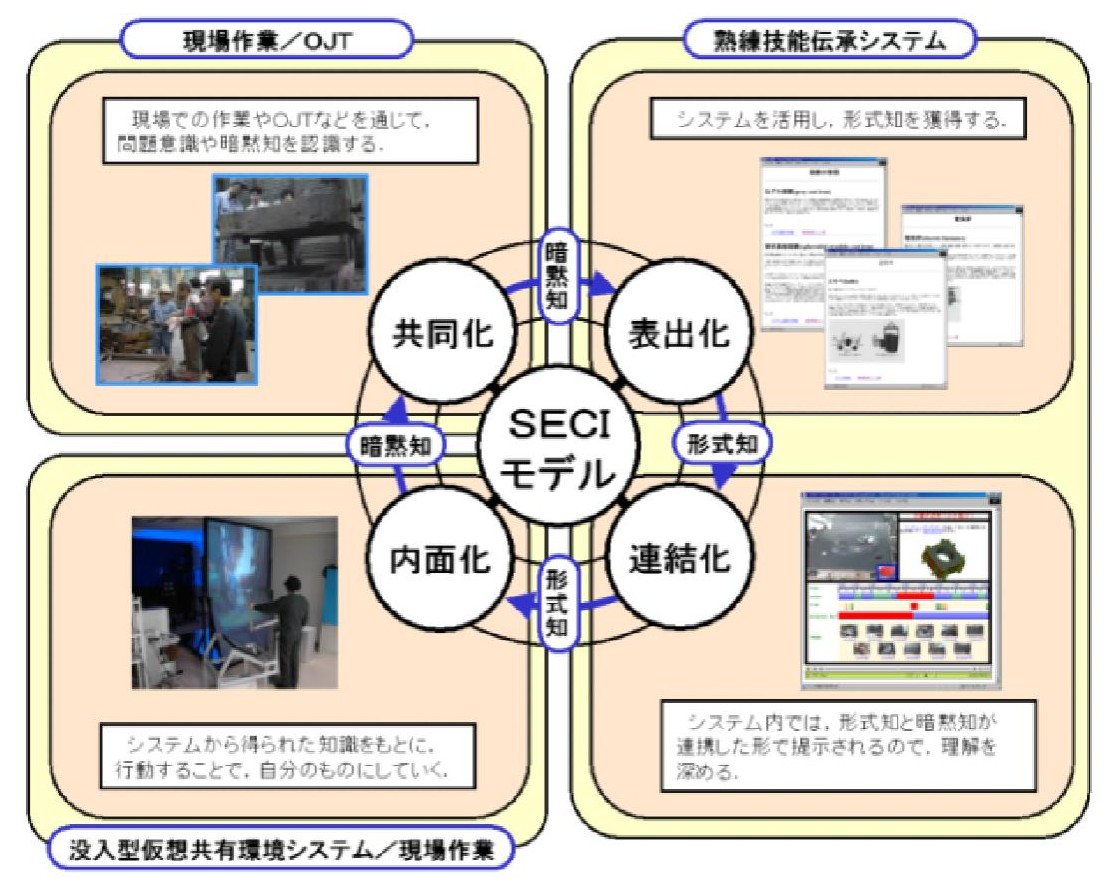
図2 SECIモデルによる知識変換プロセス |
- マルチメディア技術による熟練技能伝承システム
図3は著者らが開発した熟練技能伝承システムの概要を示します.
ユーザは検索や知識可視化システムにより,必要とする知識に効率よくアクセスできます.
暗黙知はSMIL(Synchronized Multimedia Integration Language :同期マルチメディア統合言語)を用いて提示し,
形式知はXML(eXtensible Markup Language :拡張可能なマーク付き言語)を用いて提示しています.キーワードとなる知識ついては,
関連知識へリンクが貼られており,必要に応じて関連情報・知識を効率的に獲得できます.
また,映像では表現できない部分については,3次元CADデータやCAEシミュレーションと連携し,補完しています.
本システムにより,従来のような場の共有による技能伝承やビデオライブラリなどを用いた技能伝承では得られないような効果が大いに期待できます.

図3 熟練技能伝承システムの構成 |
- VR 技術による熟練技能伝承
図4は著者らが開発したサイバーアシスト・マイスター・ロボット(CAMRobot: Cyber Assist Meister Robot)を示します.
CAMRobotは,鋳物工場などにおける熟練技能を伝承し,さらに新たな知識を創出するためのロボットです.
本ロボットシステムは,鋳造に関する知識獲得のための熟練技能伝承システム(タッチパネル式コンピュータ)と技能獲得のための可搬型仮想共有環境システム(バーチャルリアリティシステムと力覚呈示装置を組合せたシステム)で構成されています.
熟練技能伝承システムでは,体験者はタッチパネル式コンピュータでの簡単な操作により,鋳造に関する知識を自分のレベルに合わせて,
短時間に修得することができます.可搬型仮想共有環境システムでは,
体験者は上下2面型スクリーンを通じ3次元立体視映像とその映像に同期化された力覚を同時に呈示されることにより,
鋳造現場における数多くの作業を体験することができます.鋳造技能の中には,注湯作業や突固め,
中子の据付など,言葉では表現することができない作業が数多くあり,本ロボットシステムでは,
これらの作業を文書情報や映像情報としてだけではなく,視覚や力覚など実際の感覚に近い形で体験可能なものとなっています.

図4 サイバー・アシスト・マイスター・ロボットの構成 |

図5 VR技術による熟練技能伝承の一例 |
- おわりに
本稿では,高度な技能などが要求されている鋳物工程を事例に取り上げ,新たな熟練技能伝承および人材育成について述べました.
「匠の技」を効率的かつ確実に内面化するためには,知識のみ ならず,視覚情報,力覚情報,さらにはコミュニケーションをまじえることにより,
効果的な技能伝承および人材育成を行うことができます.
|
