|
UFOキャッチャの開発
東北学院大学
工学部機械知能工学科 田中佑樹
ある日、文化祭の出し物を何にするかという話し合いが行われ、
私のアイデアでUFOキャッチャを作ることになった。
予算の3万円以内ということで材料には木を採用し、木の種類としてはMDFを選択した。
MDFは木材系の材料で、レーザ加工が可能なため比較的簡単に製作を進めることができる。
材料が決まったらレーザ加工を前提にCADで設計をしていった。レーザ加工を使用することによって
精度を出すことができ、複雑な形もきれいに加工できる。レーザによりカットした面が焦げて黒くなる
ことについては、個人的になかなかかっこいいと思う。
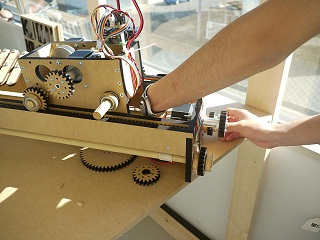
UFOキャッチャの平面の駆動方式にはラック歯車を採用し、そしてアームの上下にはワイヤの巻き取り機構を採用した。
設計するに当たってまず決めないといけないのは全体のサイズである。サイズについては実機を参考に800×800
ぐらいでということで干渉する部分を考えラックの長さを850mmとした。
これを元にラックと補助用のレールを組み合わせた時のたわみ量を計算しつつ寸法を調節していった。
このとき材料力学の知識がとても役立った。
次に可動部分の設計である。動力源にはステッピングモータを使用することは決まっていたのだが、歯車もMDFで
製作するということもあり、効率がわからないため減速機をつけることにした。もちろん減速機もMDFの歯車で設計した。
先生が制作したソフトフェアで複数の歯車の図面データを用意してくれたので、その中から歯車の大きさなどを考慮し
2/5という減速機に設定した。
ステッピングモータはユニポーラのものをバイポーラ駆動とし、マイクロステップで動かし、高出力で駆動できる
ようなモータドライバを使用した。UFOキャッチャは大きいためマイクロステップを使用することにより振動を軽減す
ることができる。
アームの上下する機構はステッピングモータに取り付けたリールで金属ワイヤを巻き取る機構を使用した。
ただワイヤでつり下げると回転したり揺れが大きくなったりしてしまうので、マジックハンドの機構を補助用と
して取り付けた。アームの回転部分とアーム部分にはラジコンサーボを利用した。
レーザ加工が終わった後のMDF板を組み立てる際には設計ミスと思われるところが多数見つかってしまった。
たとえば鍋ネジを使用すると干渉してしまったことや、コースレッドという木ねじでそのまま止めてしまうと
割れてしまうなどの問題があった。
しかしあまり深刻な設計ミスでもなかったため、ざぐり加工をして皿ネジを利用したり、下穴を開けてから
止めたりと、工夫することにより問題なく組み立った。
このときレーザ加工のすばらしさを実感した。
レーザ加工で加工できない軸の部分は自分たちで加工することにした。軸も木で製作するため、研究室の旋盤で
加工した。1年生の時に一通り工作機械を使った程度なのであまり使い方を覚えていなかったが、実践することにより
工作機械の使い方を学ぶことができた。
軸を作成した際は何度も失敗を重ねて完成させることができた。
制御部品、回路は先生設計のマイクロステップモータドライバとDMAを用いたラジコンサーボ制御回路を使って
製作した。
制御用マイコンにはH8マイコンを使用し、プログラム言語にはC言語を用いた。また、UFOキャッチャを動かす
コントローラもMDFで自作するなど細部までこだわった。
コントローラは開閉式になっており、内部には調節用ボタンや超高速動作モードに変更するボタンを隠しボタンと
して取り付けた。
UFOキャッチャは余裕のあるスケジュールで完成したのだが、当日の朝に不具合が発生してしまった。先生にも
手伝ってもらい、いろんな箇所を調べた結果マイコンの半田不良が発覚した。当日の朝、設置場所に運んだ際の振動
などによりうまくついていなかった半田がはがれてしまったと思われる。開始時間までには間に合ったが、このよう
なパプニングも良い経験になった。
当日は小さい子供たちにとても好評だった。特に小さい子供が景品を取りやすいにアームを強くし、つかみやすく
改良したのは良かったと思う。
このUFOキャッチャを作るに当たって研究室のみんなが仲良くなれたと思う。さらに大学の講義で習った事を実践で
使ったことにより理解が深まり、実際にどのような場面において役立つのかなどを知ることができてとてもために
なったと思う。特にCADや工作機械の使い方などは現在卒業研究をするに当たってとても役に立っていると思う。UFO
キャッチャで使用したMDFのレーザ加工についても研究室の基本技術となり、このUFOキャッチャは大成功だったとい
える。この経験を生かして卒業研究もがんばりたいと思う。
|