14. 機素潤滑設計
章内目次
14.1 総論
14.1.1 機械設計・運動機構
COVID-19の影響により,2020年度に続いて2021年度も多くの学会がオンライン開催となった.2021年9月にオンライン開催された日本機械学会年次大会では,機械設計・運動機構に関連するオーガナイズドセッション「機械システムにおける機構の設計と要素技術」が設けられ,差動ネジ機構(1)やシザー機構(2)などの機構本体の基礎的な研究に加えて,レシプロ圧縮機(3),鉄道車両の車体傾斜制御(4),微粉隊の定量供給装置(5)などの具体的な装置に組み込んだ機構設計に関する研究発表が行われた.機素潤滑設計部門企画(機械設計技術企画委員会起案)の基調講演・先端技術フォーラムでは,全体のテーマを「パラレルロボット・メカニズムの基礎と応用技術」とし,基調講演では「パラレルロボット・メカニズムの実践的基礎および応用例」(6),先端技術フォーラムでは「2リム6自由度パラレルロボットの機構と運動学特性」(7),「パラレルロボットの機構特性と応用」(8)などの国内の大学におけるパラレルロボット・メカニズムの基礎と応用の研究発表が行われた.また,同先端技術フォーラムでは,FANUC社のげんこつロボット(9),パナソニック社のヘキサ型パラレルリンク機構(10),NTN社のi-WRIST(11)などの実際の現場で活躍しているパラレルロボットに関する技術講演が各企業の技術者より行われた.COVID-19の影響で2020年度に中止となった機素潤滑設計部門講演会が2年ぶりに2021年12月にオンライン開催され,「機構・運動」セッションにおいて,パラレルワイヤ機構を応用した壁面検査装置(12),マリオネットロボット(13)や差動ネジ機構用部品の製作(14)などの研究発表に加えて,オムニホイールの運動学解析にスクリュー理論を用いた新しい研究(15)も報告された.スクリュー理論は欧米ではロボットの機構解析などに盛んに応用されている有効な理論体系であり,今後の日本国内での普及と研究への応用が期待される.
日本機械学会論文集では,物体を吊るす6本のワイヤを3台のロボットアーム先端に取付けて物体の位置を協調する研究(16),前輪操舵機構の違いによる3輪機構の運動挙動の比較(17),スライダクランク連鎖を応用した動吸振器(18)などのさまざまな機構を応用した機械システムの研究が報告されている.また,英文論文誌 JAMDSM (Journal of Advanced Mechanical Design, Systems, and Manufacturing)では,デュアルカム機構を用いた新しいモーションジェネレータの研究(19)や平面パラレルロボットの伝達特性に関する基礎的な研究(20)が報告されている.
14.1.2 ヒューマン・マシン・インターフェース設計
2020年に開催予定であった,日本機械学会,ライフサポート学会,日本生活支援工学会共催で,リハビリテーション,生活支援,生体計測,制御分野等に関連するおける技術研究開発に関連するLIFE2020がCOVID-19の影響により延期となり,2021年9月にLIFE2020-2021としてオンライン開催された.「医療福祉ロボット」のオーガナイズドセッションが設けられて,歩行状態のモニタリングとブザーによる適切な歩行タイミングを提示するスマートシューズ(21),弾性体により歩行時の底屈運動をサポート装置(22)などの装着型の歩行支援装置に加え,人工股関節置換後の歩行訓練をサポートする装置(23)などのリハビリ用装置に関する研究発表が行われた.2021年9月にオンライン開催された日本機械学会年次大会のオーガナイズドセッション「人間支援・協調機械設計」では,リンク機構を用いた歩行補助装置(24)(25)や歩行訓練装置(26)や,磁気粘弾性エラストマを用いた持ち上げ動作補助スーツ(27)などの研究が報告された.2021年12月にオンライン開催された機素潤滑設計部門講演会の「アシスト・ウエアラブル」セッションにおいても,歩行補助装置に関する研究が複数講演された(28)(29)(30).また,同セッションでは,移乗介助ロボット(31),肩関節運動測定(32)およびアシストスーツ用の機械式安全装置(33)を対象とした機構設計に関する講演が行われた.
日本機械学会論文集およびJAMDSMでは,空気圧アクチュエータを用いた姿勢保持アシスト装置(34)や,リンク機構を用いた歩行支援装置の研究(35)などが報告されている.
〔原田 孝 近畿大学〕
14.2 機械要素
14.2.1 伝動要素
国内会議における研究発表は,本会の関連では,2021年度年次大会(2021年9月,千葉,オンライン開催)「伝動装置の基礎と応用」にて12件の講演発表が行われた.また,第20回機素潤滑設計部門講演会(2021年12月,オンライン開催)も開催され,伝動要素関連の発表は17件であった.国際会議については,コロナ禍の影響もあり開催されていない.
以下,歯車技術分野の主だった論文を列挙する.最初に歯車加工法について述べる.スカイビング加工時のカッタ切れ刃の傾斜角に関する研究(1),シミュレーションにより作成した歯車のマトリクス画像がホブ盤診断システムの教師データとして有効かどうかに関する研究(2),歯面での相対的すべり速度を最小にするホーニング砥石形状の決定法に関する研究(3),ホブ盤診断システムのための歯車精度表現手法に関する研究(図14-2-1)(4)などが報告された.(A)理想的な状態でホブ切りした場合.(B)ホブに取付振れがある場合.(C)ブランクの取付振れがある場合.(D)ホブと歯車の軸間が軸方向送りと共に広がる場合.(E)上記(B),(C),(D)全ての誤差運動を有する場合.理想的な状態でホブ切りした(A)のマトリクス画像と他の4条件のマトリクス画像を比較すると,それぞれの誤差運動の種類ごとに異なった特徴を持っていることがわかることを明らかにした.
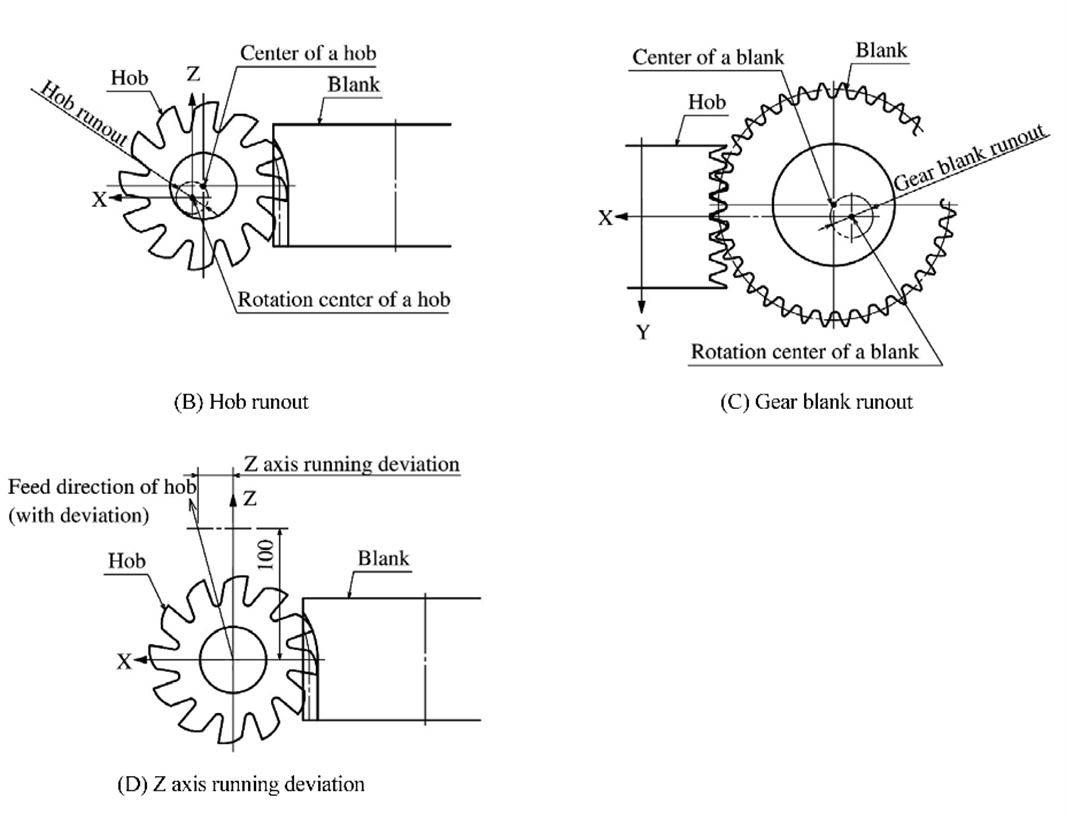
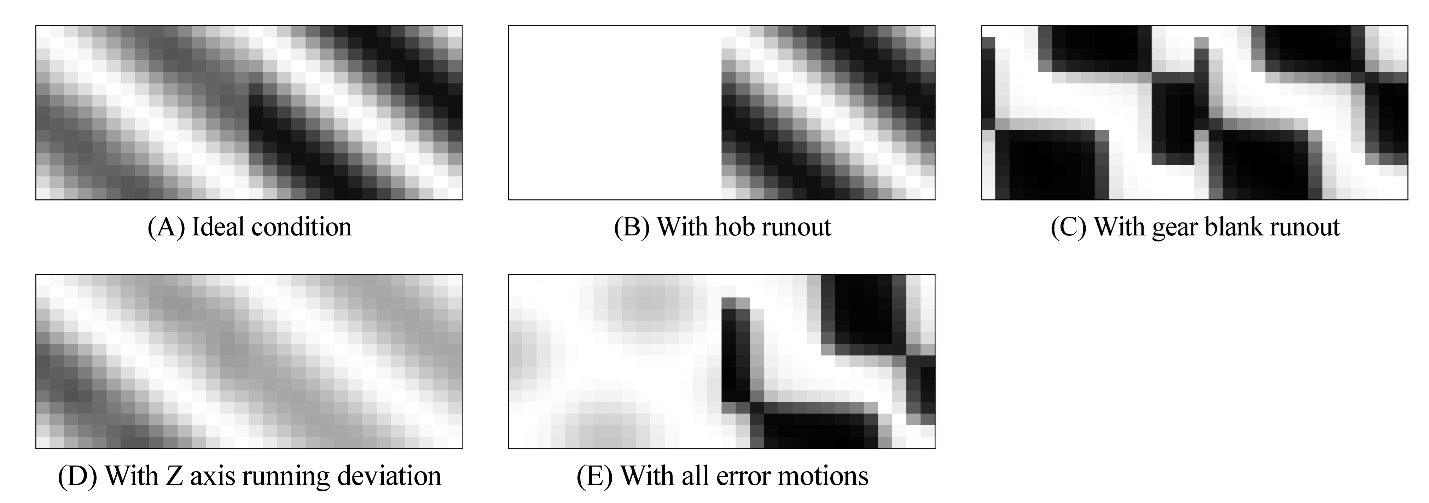
図14-2-1 誤差運動の種類(上図)とマトリクス画像(下図)
歯車装置の振動については,平歯車ポンプの騒音成分を発生している部品の特定に関する研究(5),
歯当たり解析と起振力解析を組み合わせることで複数歯の歯車誤差を考慮し,非整数次成分の起振力解析を行う研究(6),歯車構造物内にダンピング要素を入れた場合の解析法と実験に関する研究(7),かみ合い誤差,かみ合い剛性,バックラッシを考慮した平歯車対の非線形振動モデルに関する研究(8),ピニオンの軸方向支持剛性を考慮したダブルヘリカルギヤの新しい3次元歯当たり解析(3-DTCA)モデルを用いて,三次元の負荷時伝達誤差を低減させる研究(9)などが報告された.
また,動力損失に関して,自動車のパワーステアリングシステムに使用されるラック&ピニオンのすべり速度と伝達効率に関する研究(10),平歯車のかみ合い摩擦損失に及ぼす潤滑油基油と精製度の影響評価に関する研究(11),歯面を平滑化(Ra0.1付近)した歯車の場合には,必ずしも摩擦損失予測精度が十分ではなかったので,歯研仕上げと平滑化歯車ではΛ値を用いることで摩擦係数の予測精度を向上させる研究(12)などが報告された.
歯車の強度に関しては,平歯車の表面粗さと表面損傷の関係についての実験的研究(13),プラスチック歯車の負荷容量評価のためのPV積分値活用に関する研究(14),プラスチック歯車において全自動耐久試験システムを活用することで,耐久試験の精度向上を評価した研究(15),微小ねじ歯車の負荷特性に関する基礎研究(16),歯車用高強度鋼材の二円筒接触・曲げ複合疲労試験に関する研究(17),平歯車の熱処理表面有効効果層深さの妥当性検討に関する研究(18),無潤滑条件下における浸硫窒化処理した炭素鋼製歯車の摩耗を評価した.その結果浸硫窒化と窒化を組み合わせた表面処理が最も低い摩耗量を示した(図14-2-2)(19).
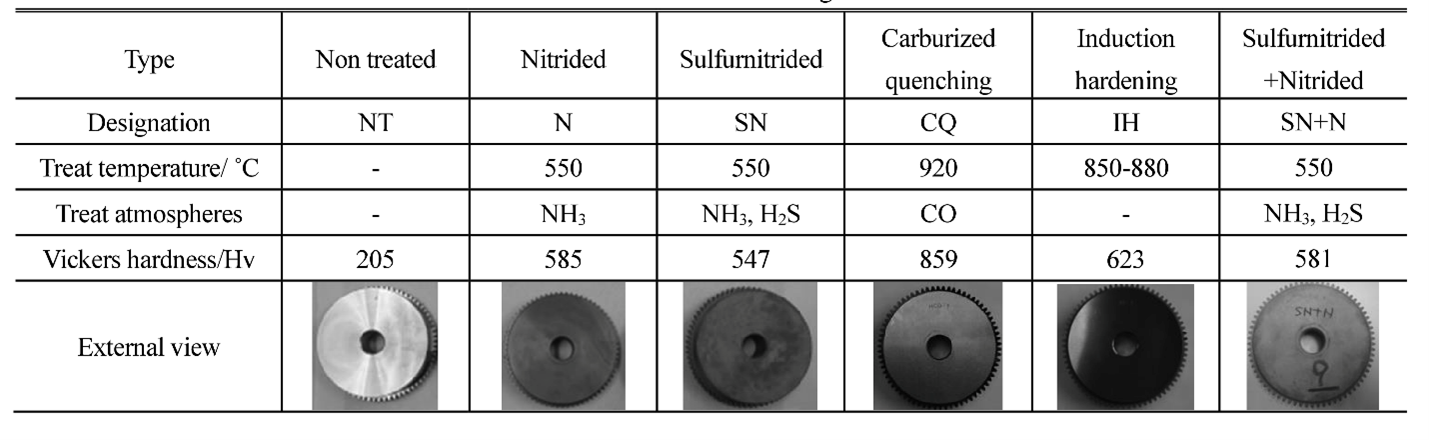
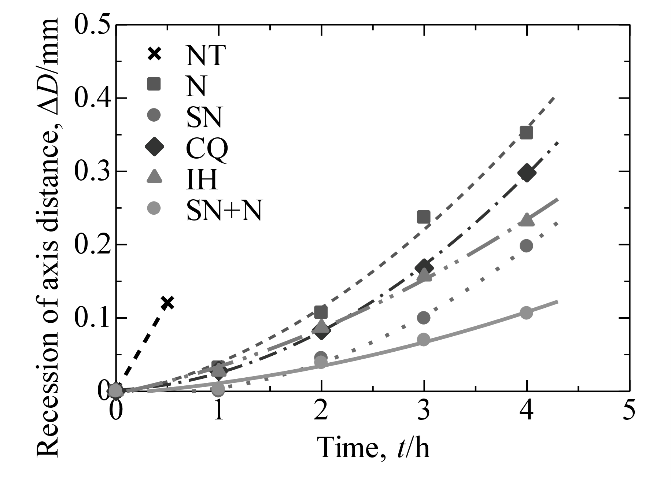
図14-2-2 処理による摩耗状況の違い
さらに,計測技術に関して,高速回転している歯車の稼働状態を非接触で監視するスマートギヤの温度変化が観測用アンテナの周波数特性に与える影響についての研究(20)が報告された.
これらに加えて歯車以外では,トラクションドライブに関する研究として,円筒ころ軸受で構成されたトラクションドライブ式無段変速機の変速比幅増大に関する研究(21),非金属介在物がトラクションドライブの転がり疲労強度に与える影響に関する研究(22),マイクロバブルを用いてトラクションドライブ接触部周辺の油膜の可視化に関する研究(23),円筒ころ軸受を用いた無段変速機の動力伝達メカニズムに関する研究(24),高回転におけるトラクションドライブと歯車の伝達性能測定に関する研究(25)などが報告された.チェーンに関しては,CVTの多角巻付きに伴う摩擦損失に関する研究(26)などが報告された.
そのほか,かみ合い理論に基づき,純転がり非円形ラインギヤ(PNLG)機構(27)などが報告された.
〔東﨑 康嘉 近畿大学〕
14.2.2 ねじ,軸受,案内,シール
2021年度年次大会講演会では,ねじ関連の発表が9件,軸受及び案内関連の発表が3件あった.第20回機素潤滑設計部門講演会では,ねじ関連の発表が3件,軸受関連の発表が11件あった.
a. ねじ
締結ねじでは,ボルト接合構造のモード減衰比の推定方法の研究(1),スレッドミルによるねじ切りの切削力に関する研究(2)などがあった.
b. 軸受
滑り軸受に関する研究としては,撥水領域と親水領域を交互に配置した部分撥水スラスト軸受に関する研究(3),撥水部,弱撥水部,親水部を交互に配置した部分撥水スラスト軸受に関する研究(6),ティルティングパッド軸受の軸受定数の周波数依存性に関する研究(4),ティルティングパッド軸受の油膜温度に関する研究(5)などがあった.転がり軸受に関する研究としては,小型玉軸受の疲労寿命に関する研究(7),アンギュラ玉軸受の接触角が予圧に与える影響に関する研究(8)などがあった.
c. 案内
直動ボールガイドに関する研究としては,ミスアライメントと運動精度の関係に関する研究(9)(12),動的シミュレーションに関する研究(10),減衰特性に関する研究(11),剛性解析に関する研究(13)などがあった.
d. シール
シールに関する研究としては,ガス井の噴出防止装置のシールに関する研究(14)などがあった.
〔岡田 学 長野工業高等専門学校〕
14.3 アクチュエータ
本会2020年度年次大会(2021年9月,千葉/オンライン)において,本会機素潤滑設計部門(本部門)アクチュエータシステム技術企画委員会(AS委員会),ロボティクス・メカトロニクス部門とのジョイントセッション「次世代アクチュエータ」が企画され,6件の口頭発表があった.形状記憶合金などの機能性材料を用いたアクチュエータ,ソフトアクチュエータ,機能性流体を用いたアクチュエータに関する研究成果が報告された.
同大会では,東京工業大学金俊完准教授より「MEMS技術によるマイクロ液圧源の高パワー密度化とその応用」と題した基調講演が行われ,MEMS技術を利用した流体システムについてご紹介いただいた.また,先端技術フォーラムとして「圧電アクチュエータ」が企画され,5件の講演が行われた.圧電アクチュエータの基板技術ならびにその応用展開などについて広く議論する場となった.
日本機械学会ロボティクス・メカトロニクス部門が主催するロボティクス・メカトロニクス講演会2021(オンライン)では全体で1,132件の発表が行われた.OS「アクチュエータの機構と制御」,OS「ソフトロボット学/フレキシブルロボット学」,OS「フルードパワーロボティクス」を中心にMcKibben型空気圧人工筋肉(1), 誘電エラストマアクチュエータ(2)(3),形状記憶合金アクチュエータ(4)など多くのアクチュエータ・センサ関連の最新の研究成果が報告された.
〔佐々木 大輔 香川大学〕