
やさしい制御工学
第2回 ラプラス変換と伝達関数

1 ラプラス変換とその性質
制御工学では、ラプラス変換とこれに基づく伝達関数が用いられる。ラプラス変換を行うと、微分や積分は代数的な演算に置き換わる。そのため、複数の動的な要素から構成されるシステムの解析や設計を行う際に、計算の見通しが良くなる。また、ラプラス変換とその逆変換を用いると、動的システムの時間応答を算出出来る。ここでは、ラプラス変換とその代表的な性質について説明しよう。$t \ge 0$で定義される時間関数$f(t)$について、
| \[F(s) \triangleq \int_0^{\infty} f(t) e^{-st} dt\] | (1) |
が複素数$s$($=\sigma+j\omega$)のある値に対して存在するとき、複素関数$F(s)$を$f(t)$のラプラス変換という。ここで$j$は虚数単位(すなわち$j^2=-1$)である。また、変数$s$をラプラス演算子という。式(1)が表す$f(t)$から$F(s)$への変換を$F(s)=\mathcal{L}[f(t)]$と略記する。なお、$|f(t)| \le M e^{\alpha t}$を満たす$M$、$\alpha$が存在するとき、ラプラス変換可能であることが知られている。このことから、制御工学で扱われる時間関数のほとんどはラプラス変換可能である。代表的な関数とそのラプラス変換を表2.1に示す。例えば、単位ステップ関数
| \[ f(t) \triangleq \left\{ \begin{array}{ll} 0, & t < 0 \\ 1, & t \ge 0 \end{array} \right. \] | (2) |
のラプラス変換は、$\mathrm{Re}\ [s]>0$の場合に存在し、
| \[F(s) = \mathcal{L}[f(t)] = \int_0^{\infty} e^{-st} dt = \left[ -\frac{e^{-st}}{s} \right]_0^{\infty} = \frac{1}{s}\] | (3) |
となる。
表2.1 ラプラス変換表

ラプラス変換の代表的な性質を表2.2に示す。ここで、$f(t)$の一階微分$df(t)/dt$のラプラス変換$\mathcal{L}[df(t)/dt]$を求めてみよう。部分積分の公式より、次式が成り立つ。
| \[ \begin{split} \mathcal{L}\left[\frac{df(t)}{dt} \right] &{}= [f(t) e^{-st} ]_0^{\infty} + s\int_0^{\infty}f(t) e^{-st} dt \\ &{}= \lim_{t \to \infty} f(t) e^{-st}-f(0)+sF(s) \end{split} \] |
(4) |
したがって、$\mathcal{L}[df(t)/dt]=sF(s)-f(0)$が得られる。これより、初期値$f(0)$が零である場合、$f(t)$の時間微分$df(t)/dt$のラプラス変換は、$f(t)$のラプラス変換$F(s)$に$s$を乗じることにより得られる。このことから、$s$を微分要素という。
表2.2 ラプラス変換の性質
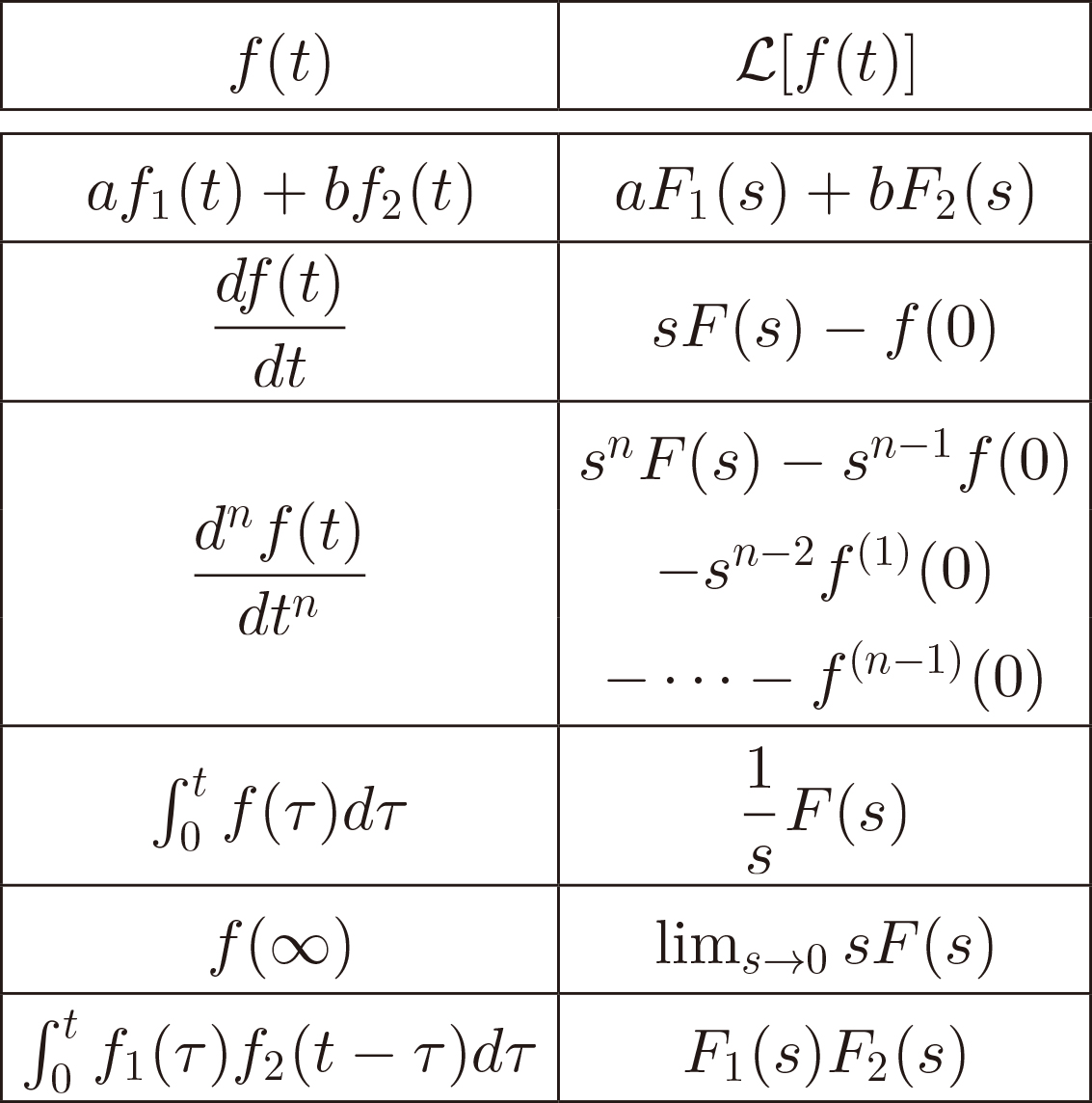
つぎに、関数$f(t)$の積分$\int_0^t f(\tau) d\tau$のラプラス変換を求めよう。部分積分の公式より以下の関係が成り立つ。
| \[ \begin{split} & \mathcal{L} \left[ \int_0^t f(\tau)d \tau \right] = \int_0^{\infty} \left( \int_0^t f(\tau) d\tau \right) e^{-st} dt \\ &{}= \left[-\frac{1}{s} e^{-st} \int_0^t f(\tau) d\tau \right]_0^{\infty} + \frac{1}{s} \int_0^{\infty} f(t) e^{-st} dt \\ &{}= – \frac{1}{s} \lim_{t \to \infty} \left( e^{-st} \int_0^t f(\tau) d\tau \right) + \frac{1}{s} F(s) \end{split} \] |
(5) |
したがって、$\mathcal{L}[\int_0^t f(\tau) d\tau]=\frac{1}{s} F(s)$が得られる。すなわち、$f(t)$の積分$\int_0^t f(\tau) d\tau$のラプラス変換は、$f(t)$のラプラス変換$F(s)$に$1/s$を乗じることにより得られる。このことから、$1/s$を積分要素という。
ラプラス変換$F(s)$から時間関数$f(t)$を求めることを逆ラプラス変換といい、
| \[ f(t)=\frac{1}{2 \pi j} \int_{c-j\omega}^{c+j \omega}F(s) e^{st} ds \] | (6) |
で定義される。ここで、$c$は実定数である。式(6)の$F(s)$から$f(t)$への変換を$f(t)=\mathcal{L}^{-1} [F(s)]$と略記する。$F(s)$が有理関数($s$に関する多項式を分母と分子に持つ関数)である場合、逆ラプラス変換は、式(6)を直接用いるのではなく、まず、$F(s)$を部分分数に展開し、つぎに、表2.1の関係を用い、展開した項毎に逆ラプラス変換を行う、という手順で実行できる。
2 伝達関数
あるシステムへの入力$u(t)$と出力$y(t)$のラプラス変換を、それぞれ、$U(s)$と$Y(s)$とする。このとき、伝達関数$G(s)$は、$U(s)$と$Y(s)$の比として定義される。すなわち、
| \[ G(s) \triangleq \frac{Y(s)}{U(s)} = \frac{ \mathcal{L}[y(t)]}{\mathcal{L}[u(t)]} \] | (7) |
である。これより、以下の関係が成り立つ。
| \[ Y(s) = G(s)U(s) \] | (8) |
なお、制御工学では、式(8)の入出力関係を持つシステムを、図2.1のように図式的に表現する。

図2.1 $Y(s)=G(s)U(s)$のブロック線図表現
あるシステムへの入力$u(t)$とその出力$y(t)$が、次の定数係数線形常微分方程式を満たすものとする。
| \[ \begin{split} &\frac{d^n y(t)}{dt^n } + a_{n-1} \frac{d^{n-1} y(t)}{dt^{n-1}}+\cdots + a_1 \frac{dy(t)}{dt}+a_0 y(t) \\ &\quad = b_m \frac{d^m u(t)}{dt^m} + \cdots + b_1 \frac{du(t)}{dt} + b_0 u(t) \end{split} \] |
(9) |
ここで$m$、$n$は整数である。上式の両辺を初期値を零としてラプラス変換すると次式が得られる。
| \[ \begin{split} &(s^n+a_{n-1} s^{n-1} + \cdots + a_1 s + a_0) Y(s) \\ &\quad = (b_m s^m + b_{m-1} s^{m-1} + \cdots + b_1 s + b_0) U(s) \end{split} \] |
(10) |
ここで、表2.2の高階微分のラプラス変換の関係を用いた。これより、このシステムの伝達関数は、
| \[ G(s) = \frac{Y(s)}{U(s)} = \frac{b_m s^m + \cdots + b_1 s + b_0}{s^n + \cdots + a_1 s + a_0} \] | (11) |
の形式で表せる。このように、システムの入出力関係を微分方程式を用いて記述し、初期値を零としてラプラス変換した後、入力から出力までの関係式を導き出すという手順で伝達関数を求められる。
あるシステムの伝達関数$G(s)$が、$G(s)=N(s)/D(s)$で表されているものとする。ここで、$N(s)$と$D(s)$は$s$に関する多項式であり、$D(s)$の次数は$n$、$N(s)$の次数は$m$であるものとする。このとき、このシステムは$n$次系であるという。また、$n \ge m$のとき、$G(s)$はプロパーであるという。特に、$n>m$のとき、$G(s)$は強プロパーであるという。一方、$N(s)=0$の根を零点という。また、$D(s)$を特性多項式という。$D(s)=0$を特性方程式といい、その根を極という。
例題:以下の運動方程式で記述される一自由度のばね質量ダンパ系について考える。
| \[ m \frac{d^2y(t)}{dt^2} + c \frac{dy(t)}{dt} + k y(t) = u(t) \] | (12) |
ここで、$u$は外力、$y$は質点の変位である。また、$m$は質量、$k$はばね定数、$c$は粘性係数であり、$m=1$kg、$c=5$Ns/m、$k=4$N/mとする。以下の問に答えよ。
- 初期値を$y(0)=2$m、$\dot{y}(0)=1$m/s、入力を$u(t)=0$Nとする。$y(t)$を求めよ。
- 入力$u$を、出力を$y$とする。伝達関数$G(s)$を導出し、その極を算出せよ。
解答例:
- 式(12)の両辺をラプラス変換すると、$(s^2Y(s)-sy(0)-\dot{y}(0))+5(sY(s)-y(0))+4Y(s)=U(s)$を得る。ここで、表2.2の高階微分のラプラス変換の関係を用いた。これに初期値および$U(s)=0$を代入し、整理すると、
\[ Y(s) = – \frac{1}{s+4} + \frac{3}{s+1} \] (13) を得る。これより、$y(t)=\mathcal{L}^{-1}[Y(s)]= -e^{-4t} + 3 e^{-t}$を得る。ここで、表2.1の指数関数のラプラス変換の関係を用いた。
- 式(12)の両辺を、初期値を零、すなわち、$y(0)=0$、$\dot{y}(0)=0$としてラプラス変換し、整理すると、
\[ G(s) = \frac{Y(s)}{U(s)} = \frac{1}{s^2+5s+4} \] (14) が得られる。また、特性方程式が$s^2+5s+4 = (s+1)(s+4) = 0$であることから、極は$-1$、$-4$である。
<正員>
和田 信敬
◎広島大学大学院 先進理工系科学研究科 教授
◎専門:制御工学
キーワード:やさしい制御工学