
宇都宮にロボット研究者たちが大集合 「ROBOMECH2024 in Utsunomiya」レポート

一般社団法人 日本機械学会ロボティクス・メカトロニクス部門が主催する「ロボティクス・メカトロニクス講演会2024 in Utsunomiya(ROBOMECH2024)」が、2024年5月29日(水)~6月1日(土)の日程で「ライトキューブ宇都宮」で開催されました。テーマは「ロボティクス・メカトロニクスの社会実装を通じた学術の深化」です。参加者数は約 2,000名でした。

「ロボティクス・メカトロニクス講演会2024 in Utsunomiya(ROBOMECH2024)」
「ROBOMECH」では様々なロボティクス・メカトロニクス(ロボメカ)に関する研究が「ポスター発表」されます。ポスター発表とは、大きなサイズに印刷したポスターに研究の背景や目的、実際の研究詳細や鍵となる図表、結論などをまとめ、その横に研究者自身が立って来場者に口頭で説明を行う、研究発表形式の一つです。
ポスター発表の様子
ポスター発表の利点は、発表者と聴講者の距離が圧倒的に近いことです。詳細だろうがざっくりした質問だろうが、どんなことでも互いに聞くことができます。会場では多くの発表が行われ、通路が人で埋め尽くされてあちこちで活発な議論が行われていました。

ランチョンセミナーも大勢の人が熱心に聴講
今回は5月31日に行われたポスター発表の内容をごく簡単にレポートします。ソフトロボットや作業移動ロボットなど色々なロボットの発表が、一部実物を交えて行なわれていましたので、実物展示があったものを中心にご紹介します。

会場となった「ライトキューブ宇都宮」。宇都宮駅東口直結
「こんな研究発表があった」ということしかお伝えできませんが、学会発表会場の熱気を少しでも感じて頂ければ幸いです。前回の「ROBOMECH2023」のレポート記事も合わせてご覧ください。
ソフトロボット/フレキシブルロボット
折り紙構造を利用した形状が変えられるワイヤ駆動型ソフトロボット。制御が難しいソフトロボットの動きを一部拘束するために折り紙構造を活用し、ワイヤー駆動で制御することを目指したもの

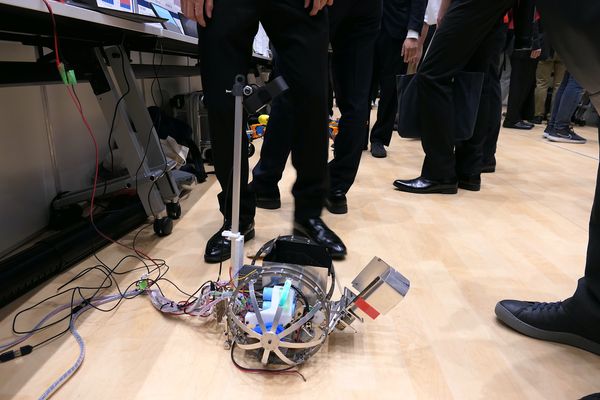
屋外でのゴミ拾いを目的とし、掃除機のホースのような索状体の手先位置を糸で制御するために機械学習を用いた研究

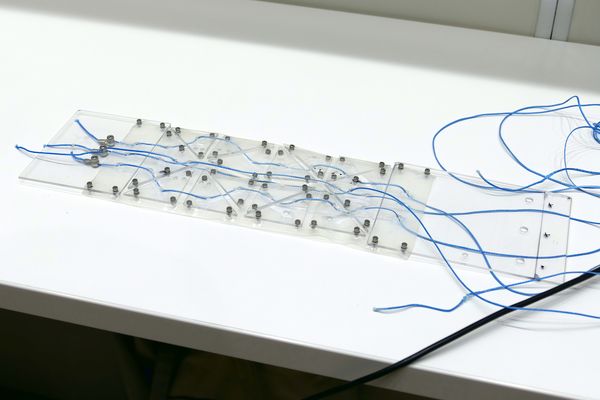
結合組織の滑りと癒着を模倣した高密度筋骨格ロボット。動物の体は骨や筋肉、膜が高密度につまっていますが、それをスムーズに動かすために滑りや癒着をどのように設計すべきかという研究

紐巻きつけ式ハンド

ワイヤーと皿状ビーズ構造を使った柔剛切り替えが可能な線状機構

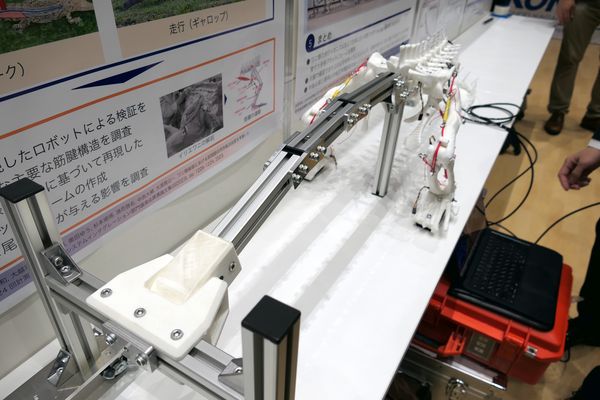
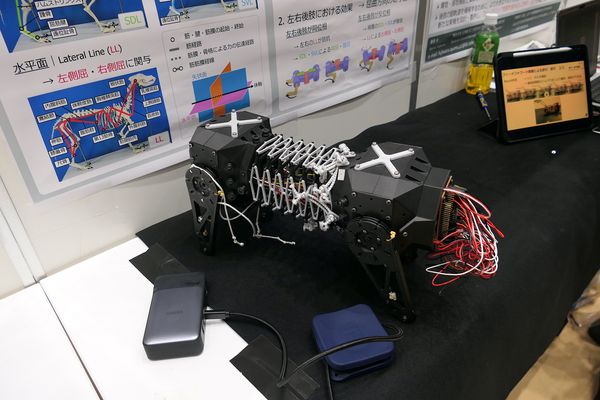
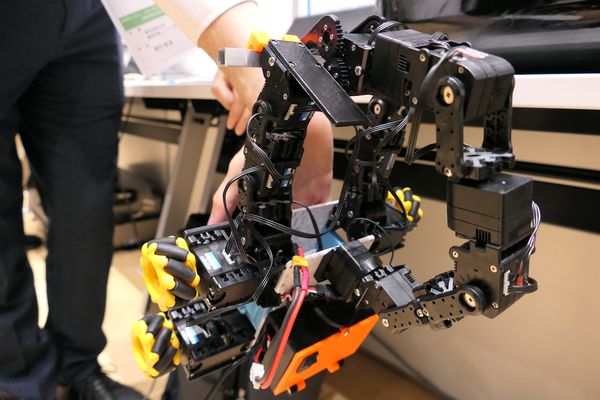
犬の四肢の筋骨格ロボット。特に柔軟に動く前足に注目した研究
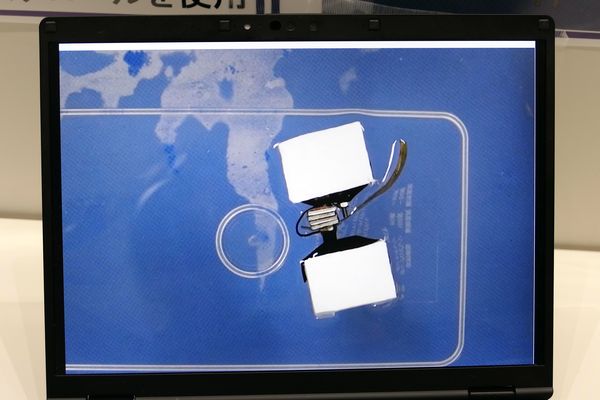
IPMC(イオン導電性高分子)の自励振動を利用した遊泳ロボット

前回の「ROBOMECH2023」で取材させてもらった新さんによる改良版の人工筋肉。片側端部の留め具を廃止

双腕インフレータブルロボットの研究発表。深層予測学習を使ってバルーンの振動や歪みの影響を抑制する動きを生成。タオル畳みや着衣解除などが可能だったとのこと。
バイオミメティクス・バイオメカトロニクス
ワニの補講を研究するための実寸台骨格プラットフォーム
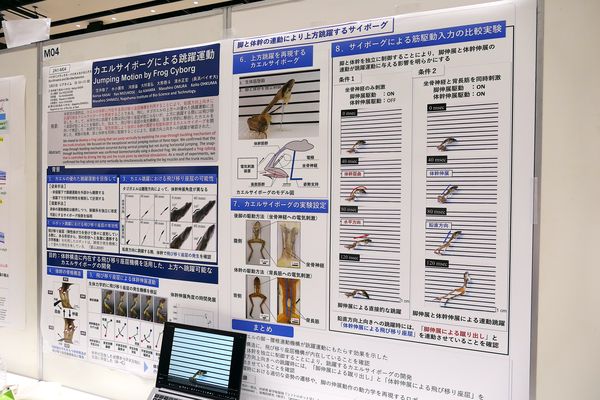
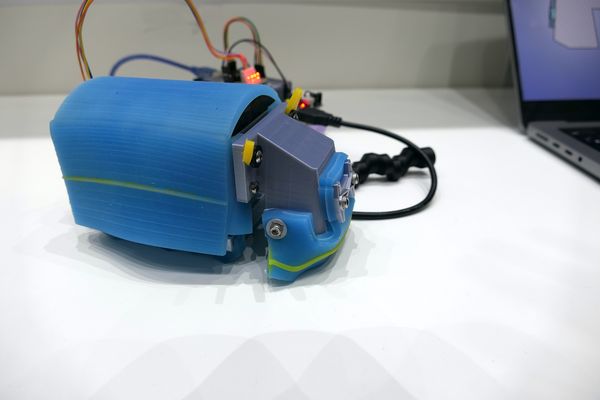
カエルサイボーグによる跳躍運動の研究

水中ゴミ回収クラゲ型ロボットの推力方向制御のための研究

古生物模倣水中ロボット。古生物の新たな復元方法の提案

細径空圧筋を使った外骨格生物模倣ロボット
粘液の上を滑るように動くウミウシ型ロボットの研究。圧電センサとステッピングモーターを活用

ヘビ型移動ロボットによる円筒形物体の搬送提案

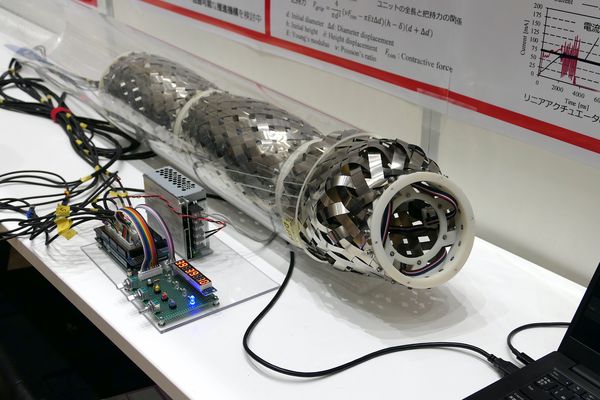
大収縮と耐面荷重を実現するラティス構造を活用したワイヤ駆動筋の作成。上腕構造
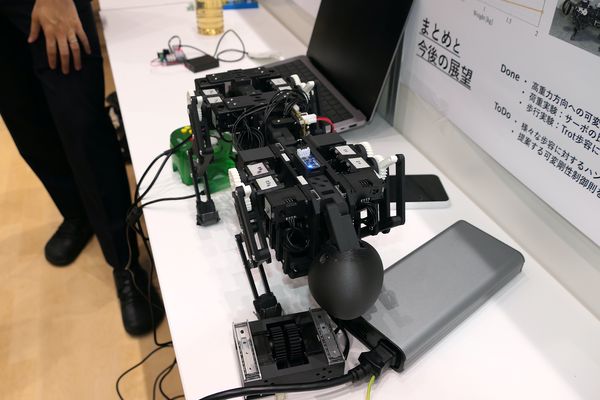
4足哺乳類の運動機能を探るためのロボティックプラットフォーム

脱力可能な関節を持つ腱駆動多関節ロボットによる投球動作
4脚ロボットの肩部ハンモック構造の研究
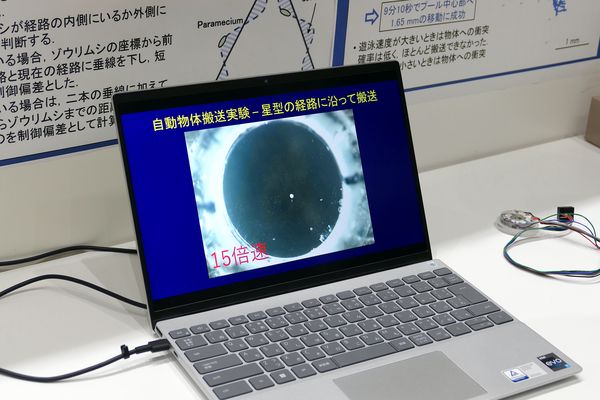
ゾウリムシを生きたマイクロマシンとして使って物体を搬送させる研究

2gの蝶型羽ばたきロボット

昆虫を手本にした匂い源探索ロボット

滑空ヘビ型ロボットの研究
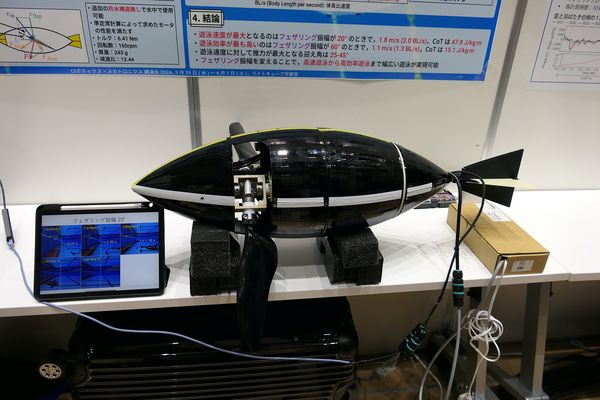
羽ばたきで泳ぐペンギン模倣遊泳ロボット。水没型ギヤードサーボモーターを活用

ポリイミド製フィルムアクチュエータを使ったプラモデルの駆動。意外と大きな力が出せる
作業移動ロボット/自然を相手にするロボット/特殊移動ロボット

トイレ清掃のための自律移動ロボット。2023国際ロボット展でもデモを行っていました
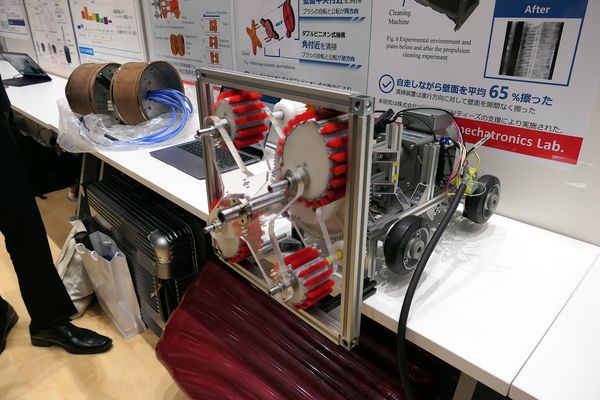
ブラシの回転方向を組み合わせる複合型遊星歯車機構を使った厨房内角型ダクト内部清掃装置の提案。清掃会社と共同で現地実験も行い、ダクト壁面を2回以上擦ることで油塵清掃率8割を達成。清掃距離2mをおよそ9分程度で清掃できたそうです
全方向移動ロボットの活動領域拡張を目指したアクティブメカナムホイールの提案

変形することで効率よく移動できる小型水上自律移動ロボット
環境中の枯葉をエネルギー源として移動できるロボットの提案

北極海氷下探索のための掘削ロボット

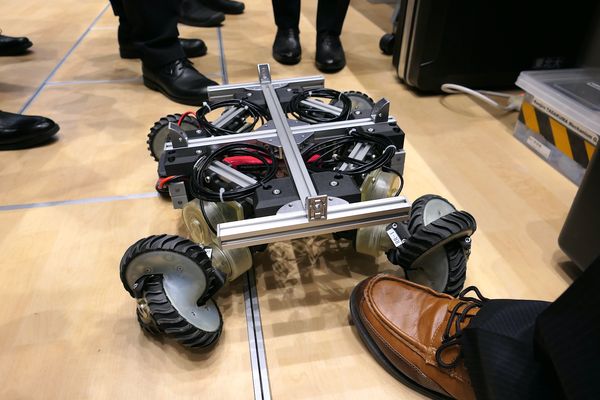
方向が自在にかえられる8輪搬送ロボット

アルキメディアンスクリューを使った不整地走行ロボット。大深度地下での活用を想定

3Dプリンタ樹脂(チタン酸カリウム繊維強化材料、ポチコン)を使った脚車輪ロボット
マニピュレータの脱力を利用した登攀ロボットの休息動作

林の中などを想定した網状の索道を自走するロボット

吸着式単腕型水中移動作業ロボットの研究
社会実装志向研究/宇宙ロボット/インフラロボット/農業ロボット/フルードパワーロボティクスなど

畜産での助産器具付きアシストスーツ。仔牛を引き出すためのウィンチがついている。バネと空気圧シリンダーを活用

ミニトマト吸引収穫機構。ヘタから実が取れるタイプのミニトマトを吸い込むことで収穫可能。シリコン製のオリフィス(穴)を回転させながら吸い込むことが実用的だという

MRブレーキを使った上肢力覚提示装置。VRでの臨場感向上用途を想定

ロボットを遠隔操作で教示して模倣学習のデータを集めるための双腕移動型マニピュレータ。幅広い動作範囲があり、同時に狭い場所でも動作を教えることができる。
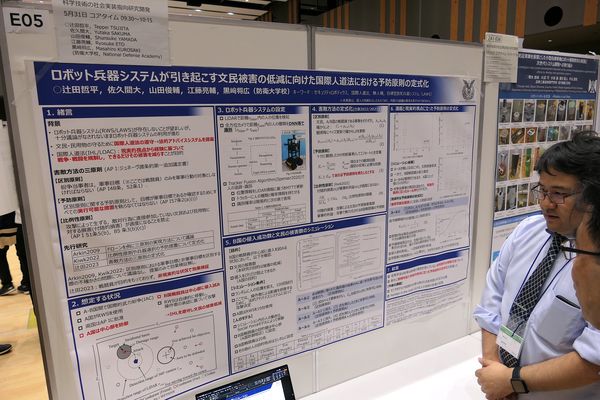
ロボット兵器システムの倫理的課題に関する研究なども
惑星探査ロボットにおける網組構造活用の提案。水平・垂直のほかテーパーがついた管も自律走行可能

スペースデブリ捕獲のための受動的把持機構

ミミズロボット機構を使った自動電線施工ロボット

家の屋根から雪を降ろすためのツール。秋田県立大では学生向けに屋根雪下ろしトライアルも実施している

医療ロボティクス/リハビリロボット

大腸経由でガス交換する腸換気システムのための大腸内推進ロボット

ウェアラブル深部静脈血栓症予防装置

重さ1kgくらいある内視鏡カメラを左手に持って治療を行うときの肘部分補助具
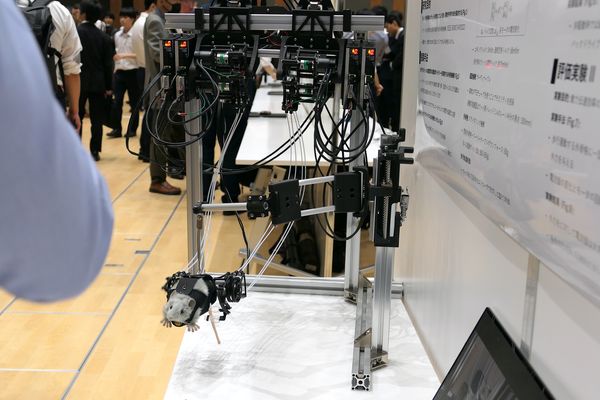
ラット用外骨格ロボットを使った神経リハビリ効果評価システムの提案

水泳ロボット用の「手」に作用する流体力推定システム
スポンサー企業ブース
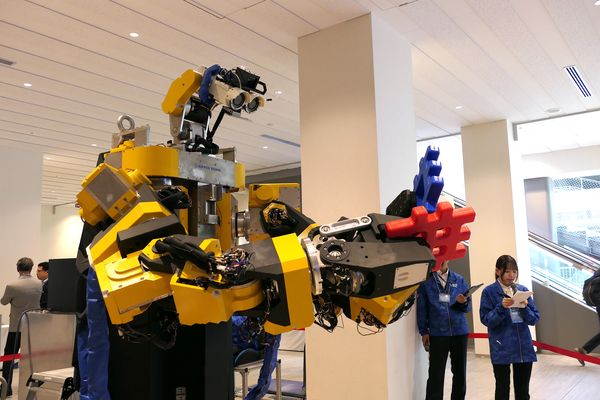
日本信号がJR西日本、人機一体と共同で開発中の遠隔操作多機能重機の製品開発用プロトタイプ。高所作業で用いられる。
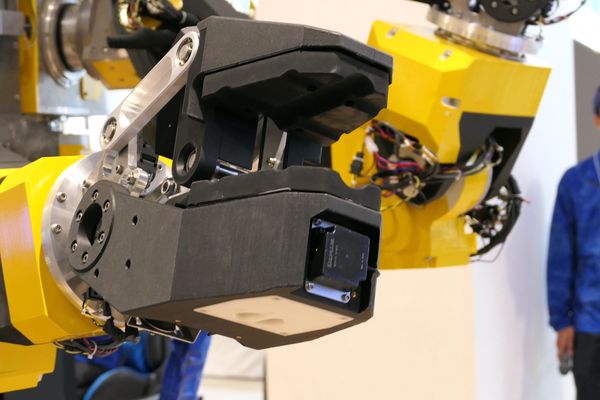
グリッパー部で様々なオプションパーツを握り込める

無線操作可能

ブリヂストンでは油圧駆動型ラバーアクチュエータも開発・用途探索中

中国Unitree社のH1。代理店TechShareによる展示

中国Unitree社の4脚ロボット

アールティ

アイリスオーヤマ傘下のシンクロボによる清掃ロボット「BROIT」
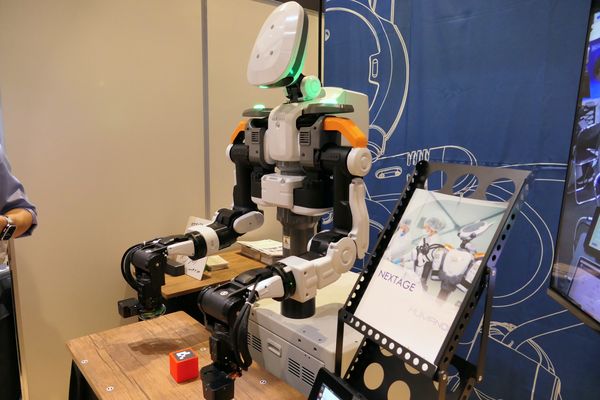
カワダロボティクス NEXTAGE

HERO Lab. 廃炉用ロボット

近藤科学

TsukArm Roboticsブース
← 宇都宮にロボット研究者たちが大集合 「ROBOMECH2024 in Utsunomiya」レポート | 「WRS2025」モノづくり分野は「箱詰め競技」 愛知県ではロボットを「第3の産業の柱」に →