
ロボット共生社会の基礎知識 「WRS2025」モノづくり分野は「箱詰め競技」 愛知県ではロボットを「第3の産業の柱」に

WRS2025「ものづくりロボットチャレンジ」は12月に愛知県国際展示場で開催予定
「Robot Technology Japan 2024」開催

愛知県国際展示場(Aichi Sky Expo)「Robot Technology Japan 2024」
2024年7月4日~6日の日程で、愛知県にある愛知県国際展示場(Aichi Sky Expo)にて、(株)ニュースダイジェスト社が主催するロボットや自動化に関する展示会「ロボットテクノロジージャパン(RTJ)2024」というイベントが行われました。
中部地方は自動車そのほか、製造業の集積地です。多くの生産現場や物流拠点が集まっており、産業用ロボットや自動化システムに関する会社も多く集まっています。そのため会場内では日常的にロボット・自動化システムを使っている多くのユーザーが集まり、非常に具体的な商談を行っていました。「うちはいま○○社の××を使ってるんだけど、ここが□□で▲なんだよね。そちらのはどうなの?」といったような会話があちこちの企業ブースで行われていました。

「産業用ロボット体験ゾーン」では楽しい演出も
WRS 2025 開催記念シンポジウム
WRS2025「ものづくりロボットチャレンジ」
2日目の午前中にはイベント内セミナーとして愛知県主催で「World Robot Summit(WRS) 2025 開催記念シンポジウム」が行われました。World Robot Summit(WRS)とは、ロボットの社会実装や研究開発の加速を目的とした、国際的なロボット複合イベントです。経済産業省と新エネルギー・産業技術総合開発機構(NEDO)が主導しており、2021年に初開催されました。
2025年には、サービス分野(フューチャーコンビニエンスストアチャレンジ)、モノづくり分野(モノづくりロボットチャレンジ)、インフラ・災害対応分野(過酷環境チャレンジ)の3カテゴリーで競技大会が行われる予定です。それぞれ別々のスケジュールで、別会場で行われます。
このうち、「モノづくりロボットチャレンジ」は愛知県のAichi Sky Expoで、2025年12月に開催される予定です。そのため、同じ会場で行われた今回の展示会「RTJ2024」でもシンポジウムが開かれたというわけです。
シンポジウムではデンソーの子会社であるデンソーウェーブと、オムロンの研究開発子会社であるオムロンサイニックエックスによる基調講演のあと、「未来のモノづくりを考える」と題したパネルディスカッションが行われ、2025年末に開催予定の「WRS 2025 ものづくりロボットチャレンジ」に関する紹介が行われました。
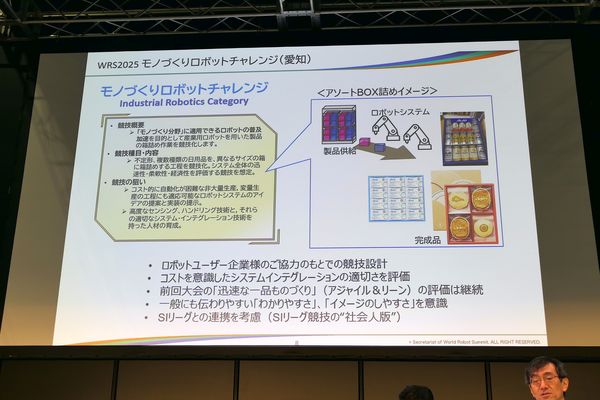
WRS2025「ものづくりロボットチャレンジ」では、ものを箱に詰める「箱詰め競技」が行われることになりました。その速度や充填率などを競うとのことです。詳細はまだ決まっていませんが、裂けやすいためロボットが苦手とするOPP(二軸延伸ポリプロピレン)と言われるフィルム素材の物体の箱詰めも行わせたいと考えているとか。
今回は、このシンポジウムの内容をざっくりと紹介しつつ、「未来のものづくり」の方向を考えたいと思います。
「AI×ロボティクス」でロボットの用途を拡大

(株)デンソーウェーブ FAプロダクト事業部 製品企画室 室長 榎本聡文氏
まず、(株)デンソーウェーブ FAプロダクト事業部 製品企画室 室長の榎本聡文氏は「AI×ロボティクス:未来の扉を開くテクノロジー」と題してデンソーのロボット開発の歴史をおおまかに紹介し、主に「人・協働ロボット」の性能向上や、ロボット関連のAI技術の動向を紹介しました。デンソーウェーブは展示も出展していましたので、合わせてご紹介します。

デンソーロボット開発の歴史
生産現場のものづくりは、ひたすら人手に頼る「人海戦術」から始まりました。現在の現場では必要な生産量をロボットと人が分担しながら作業をしています。人は状況判断、多品種の認識、そして手先の器用さが必要な作業を担って、生産を支えています。ですが人手不足により、ロボットの適応範囲の拡大が求められています。また、ロボット技術自体も向上しているため、徐々に人が行っていた作業を代替できるようになりつつあります。
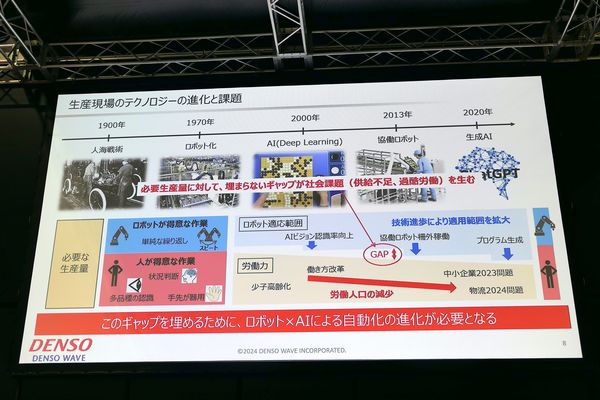
ロボット技術進化の必要性
そこで最近注目されているのが「協働ロボット」の活用です。適切に安全対策をすれば、安全のための柵の外で動かしても良いとされているロボットです。人のすぐ横でも使えます。そのため、使い方次第では大いに効果を発揮するのですが、「動作速度が遅い」という弱点があり、とにかく生産性を求める現場では実際にはあまり良いイメージを持たれていません。「協働ロボット」は医薬品や食品、化粧品など「3品産業」と言われる領域での活用が期待されているのですが、それらの現場ではとにかく高速な作業が求められているにもかかわらず、です。
デンソーウェーブでは従来の協働ロボットよりも高加速・高速で動かせる協働ロボット「COBOTTA PRO(コボッタ・プロ)」を開発・販売しています。秘密は「軽量高剛性トルクセンサー」です。協働ロボットは安全のため関節部にトルクセンサを内蔵して速度を検知していますが、これはねじれ量でトルクを推定しています。そのためどうしても柔らかいアームになってしまいがちでした。そこで高剛性トルクセンサーを専用に開発することで高速運転を行っても制御性能が出せるようにした協働ロボットが「COBOTTA PRO」です。

高剛性トルクセンサを開発して協働ロボットを高速化
もう一つの工夫は「タッチセンシングソフトカバー」です。ロボット表面全体を、センサー入りのやわらかい素材で覆います。もしぶつかっても、カバーが変形することで衝撃を軽減します。ロボットが一番ぶつかりやすい部分はアーム先端にある複雑なかたちをしたエンドエフェクタ(ハンド)ですので、そこを丸ごとおおうタイプもあります。

タッチセンシングソフトカバー
これらの工夫によって、ロボットの適用範囲が広がりました。では、どんな作業ができるようになるのでしょうか。榎本氏が実例として紹介したのは「明太子の組み合わせ計量」という作業でした。「組み合わせ計量」というのは、一つ一つは重さが異なるものがあったときに、複数個を組合わせることで、全体として一定の重さにするという作業です。たとえば「唐揚げ」などを考えると皆さんにも身近かもしれません。唐揚げは一個一個重さが違いますが、「100gほしい」という場合もありますよね。
これを明太子でもやっているのですが、普通は二人1組で行なっている作業をロボットと組み合わせることで一人で行えるようにします。ロボットは単純にピッキングするのですが、計量器が組み合わせを指示するので、人はその指示に合わせて明太子をピッキングして、一定の重さにそろえます。ベテランの目やカンがなくても、ぴったりの重さにそろえやすくなります。
さらに最近は認識能力も上がっています。昔の認識カメラは透明な素材やキラキラした素材が苦手でした。また、外の光の変動にも弱く、変動を抑えたり調整したりする必要があったのですが、最近はそれらの課題が克服されつつあります。「外乱光に対してもロバスト性が高い」と言ったりします。その結果、透明なビンやキラキラした包装で包まれたものでもピッキングできるようになっています。
動かし方にも進歩があります。ロボットのアームを動かすためにはプログラミングが必要ですが、人間には不可能なレベルで最適経路を計画するためのAIも研究されています。たとえば3台のロボットが互いにぶつからないような軌道を見つけるのはとても大変です。これを自動化しましょうという話です。
実験では、48.9秒かかっていた動きが37.2秒となり、サイクルタイムは23.9%減少となりました。間接移動量の削減やロボット間の最短距離の短縮効果もありますが、特に停止時間を短縮する効果が大きいようです。驚くべきことですが、熟練者が2週間かけて一生懸命設定した動きが、AIがわずか80秒で作った軌道計画に負けるのです。これは、現在の最適経路計画のやり方が変わる時代が近づいていることを意味しています。
また、デンソーウェーブでは機械学習の一種である「模倣学習」を使って、言語化できない作業を生成することにも力を入れています。言語化できる作業はプログラム言語化できます。ですが「ここをグッと押しながら」とか「最初はざっくり」といった表現を使われる作業は数値化できないので、なかなか動作再現が難しく、スキルの伝達が困難です。それをAIに教えて、ロボットに再現させるのです。紹介されたのはロボットが将来の状態の様子を予測しながらタオルを畳んだりできるといったものでした。また、自然言語を使って指示するだけでプログラムを生成することができるようになっています。
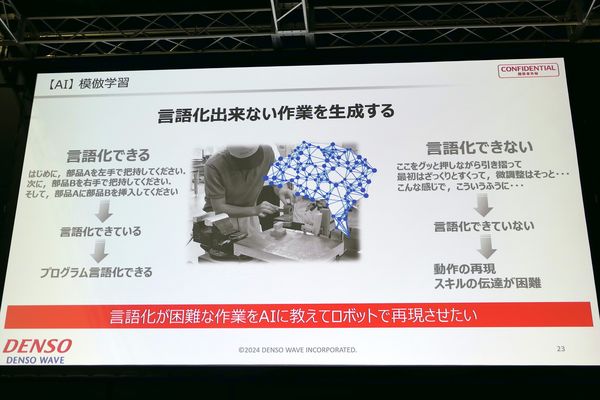
言語化が難しい作業も機械学習を使って自動化
最後に未来ビジョンとして、これまで工場のなかで使われてきたロボットが、より幅広い分野で使われるようになるだろうとし、特に「農業」での応用を紹介しました。農業従事者は19年間で100万人減少しています。デンソーは農業分野にも進出しており、単純作業の自動化を目指し、AI模倣学習技術を使ったトマト収穫などに挑んでいます。レーザーセンサーで取得した点群に欠損があってもAIで補完することができます。こうした技術を使い、農家がこれまでカン・コツで行っていた作業である「葉かき」や「整房」といった作業をAIとロボティクスで行えるようにすることが目標です。榎本氏は最後に「フィジカルの『できない』を解決していきたい」と語りました。

農業でもAI・ロボティクスを使って自動化
「不確実性への対応」で科学実験の自律化や調理動作生成も

オムロンサイニックエックス(株) ロボティクスグループ Principal Investigator 濵屋政志氏
次に登壇したオムロンサイニックエックス(株) ロボティクスグループ Principal Investigatorの濵屋政志氏は「AIで拓くオムロンサイニックエックスの近未来ロボティクス」と題して講演しました。オムロンサイニックエックス(略称:OSX)は2018年に設立されたオムロンの研究子会社です。オムロンの売り上げの大半はファクトリーオートメーション(FA)、要するに工場の自動化ですが、OSXでは、AIとロボティクスを活用することで、工場のようにきちんと整備されてない環境でも部品組み立てを可能にする技術の実現を目指しています。また、この技術は他の分野にも応用可能です。
OSXは前回大会の「WRS2020(大会そのものは新型コロナ禍で延期されて2021年に行われました)」にもオムロン、産業技術総合研究所、大阪大学、中京大学と合同チーム「O2AC」を組んで、製品組み立てチャレンジに挑戦しました(2021年09月28日のリリース)。当時の課題は「ベルトドライブユニット」というものを、部品を認識したあとに、どこに何が載っているのかを認識し、組み立てるといったものでした。

「WRS2020」時の製品組み立てチャレンジ
OSXではシミュレーション上で動作計画を行って、接触などを計算できるシステムを作ってこれに挑みました。このシステムは汎用性が高く、科学実験の自律化や調理動作にも応用可能だそうです。
やりたいことは「不確実性への対応」です。従来、というか今でも「不確実性」を少しでも減らすためには、治具やエンドエフェクタの工夫をするやり方が主流です。これに対してOSXでは、やわらかく動く「ソフトロボット」や「触覚」を活用して不確実性に対応するためのロボットの実現に挑んでいます。濵屋氏はバネを使った柔軟手首機構によるペグ挿入というタスクを紹介しました。穴に引っかかった瞬間を、変分オートエンコーダーを使った異常検知技術を活用することでうまく検知して、目標タスクを実現します。
このような機械学習技術を使うためにはデータ取得が重要です。実環境ではなくシミュレーション上でデータを収集、深層強化学習を使って学習した方策を実世界に適用する「Sim to Real」という考え方を使って、ロバストに目標を達成できるロボットを実現しようとします。
このほか、料理を行うような作業の場合は、「手順の計画」と、アーム自体の「動作の計画」を両方行わなければなりません。これらを全部、人間が書いていくのは大変です。そこで、これらの自動化も目指しています。ゆくゆくはいま話題の「大規模言語モデル」とロボットの動作を繋げ、自然言語でしゃべるだけでロボットが適切に動いて料理を行うという仕組みの実現を目指しています。
濵屋氏自身は前回の「WRS」には参加していなかったそうですが、実際に当時の協議会に参加したことで大きく成長し、オムロンサイニックエックスに入社した方もいたそうで、「WRSの経験はロボットの研究や開発に役立つのではないか」と紹介しました。

WRSで活躍しOSXに入社した人も
WRS2025は「複数のものを箱のなかに充填する」競技

パネルディスカッション「未来のモノづくりを考える」
このあと、「未来のモノづくりを考える」というテーマでパネルディスカッションが行われました。モデレーターはWRSの事務局でもある日刊工業新聞社 名古屋支社長の大崎弘江氏、パネリストは以下の3人です。
・オムロンサイニックエックス(株) ロボティクスグループ Principal Investigator 濵屋政志 氏
・一般社団法人日本ロボットシステムインテグレータ協会 会長、三明機工(株) 代表取締役社長 久保田和雄氏
・WRS2025モノづくりロボットチャレンジ競技委員長、埼玉大学 准教授 琴坂信哉氏

WRS2025モノづくりロボットチャレンジ競技委員長、埼玉大学 准教授 琴坂信哉氏
まずディスカッションの前に、WRS2025モノづくりロボットチャレンジ競技委員長の琴坂信哉氏が、今回の競技の趣旨を紹介しました。前回の競技内容は、競技直前に見せられた部品を認識して、ロボットが自動でベルトドライブを組み立てるという作業でした。ですがこれはちょっと将来を見過ぎていたと判断し、ロボットシステムインテグレーターの人たちとも相談した結果、迅速な「1品ものづくり」の評価は継続しつつも、今回は複数のものを箱のなかに充填する競技としました。
これには高度なセンシング、ハンドリング、そして、システム全体をまとめあげるインテグレーション技術がキーテクノロジーとなります。琴坂氏は「自動化が難しい中量生産物にも適用可能な技術」の競技を目指したいと語りました。

モデレーターをつとめた日刊工業新聞社 名古屋支社長 大崎弘江氏
システムインテグレーターという仕事

日本ロボットシステムインテグレータ協会(SIer協会) 会長、三明機工(株) 代表取締役社長 久保田和雄氏
日本ロボットシステムインテグレータ協会(SIer協会) 会長の久保田和雄氏はSIer協会について、FAロボット業界のネットワークの構築を目指していると紹介しました。システム・インテグレーションとは、ロボットや周辺機器を整備して一つにまとめあげる仕事のことです。それを行う人たちのことをシステム・インテグレーター、略してSIer(エスアイアー)と言います。ロボットはロボットだけでは「半完成品」ですので、まとめあげないと仕事ができません。それを行う人たちのことです。
システムインテグレーターの会社一つ一つは、それほど大きな会社ではありません。また、それぞれ得意分野が違います。そこでSIer協会では、全国規模で情報ネットワークを構築することで、大きな、あるいはもっと多様な仕事を請けられるようにすることを目指しています。なおSIer協会に参加している会社数は、2024年7月4日現在で317社だそうです。
経営基盤や事業環境向上、SIの専門性の高度化が目標ですが、さらに活動を広げていこうと、認知度向上にも力を入れています。「システム・インテグレーター」という仕事を若い人たちに「職業の選択肢」にしてもらいたいと考えて、各地域との連携構築も進めているそうです。
適用範囲が広がりつつあるロボット工学

オムロンサイニックエックス(株) ロボティクスグループ Principal Investigator 濵屋政志 氏
このあと、ディスカッションが行われました。オムロンサイニックエックス(OSX)の濵屋氏は現在の研究トレンドについて画像や触覚情報をうまく統合する研究や「ロボット基盤モデル」を作ろうといった話題を紹介。未知環境で未知の物体に対して接触を伴う操作にも対応できるロボットの可能性について紹介しました。
SIer協会会長の久保田氏は三明機工社長でもあります。現場での取り組みとして、事前に3Dイメージを作って顧客に見せることで「理解が非常に早くなる」と紹介しました。要求仕様をシミュレーションで見せることで機器の構成もタクトタイムも全てが「見える化」されるので、すぐにわかるようになるわけです。設計者は最初から3Dで設計する必要がありますので、最初は時間がかかります。ですが「これがデジタルツインの始まり」だと考えて取り組んでいるとのことでした。
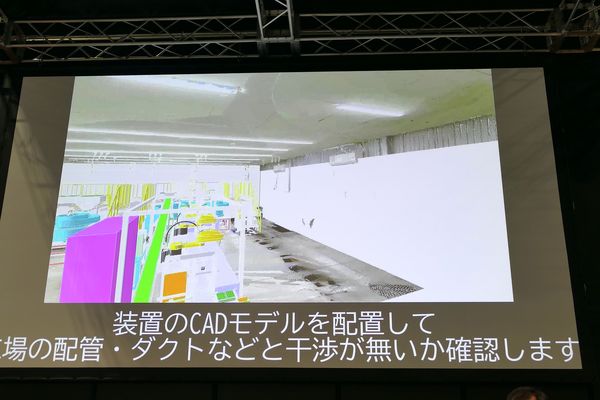
現場や設備を3次元モデルで事前に確認
琴坂氏はロボットの利用分野について、自動車から電機に活用が増大し、工作機械にも広がっていること、食品製造や搬送、業務用清掃などサービスも含む分野へと拡大しており、ロボット技術がじわじわと変化するだけでなく、「ロボットは総合工学。適用範囲が広がりつつあるのがロボット分野の現状」と述べ、ロボット単体だけではなく通信やITと繋がり適用現場が広がっていると紹介しました。
いっぽう、利用拡大には技術開発も大事ですが、人材教育や「こんな技術があるよ」と知らせることも重要です。「いまの技術でもできることはたくさんある。いかに適切に組み合わせていくか提案できる人と使いこなせる人がいるか。『いかに高性能か』ではなく、『いかに適切なのか』を提案できる人が重要。WRSはそういう技術のショーケース。何ができるのか、こういうことができるんだと知らしめることも目標の一つ」と紹介しました。
未来のものづくりに求められること
「未来のものづくりに求められること」については、OSX・濵屋氏は「未来から逆算していまあるところを見つめたい。未来を見通すためには人材の多様性が重要。融合研究で新たな研究を生み出したいと考えている」と述べました。
埼玉大学の琴坂氏は「1990年代から大学のロボット研究は現場を見なくなってしまった。アカデミックな結果が出やすいものに注力してしまった結果、現場を見なくなってメーカーとの交流がなくなってしまった。そのためここ10年くらいは実用化が重視されるようになった。現場課題をなんとかしようとする一方、逆に世界が狭くなって、特定のニーズを抱えている人しか見なくなってしまった。それでまた大学の研究は何をやっているのかということになってしまった」と現状を紹介。
そして「経験の多様性という話をしたい。人の経験には限りがある。どれだけ経験を積んできたかが新しい研究開発になる。未来から逆算するアプローチは大切だが実現は難しい」と述べ、現場に足を運んで実際に見ることが重要だと語りました。
三明機工の久保田氏は実装における一番の課題はコストなので、中小企業でも導入しやすい、安価で先進的な技術がができれば格段に広がってくるのではないかと述べました。「いかに安いコストでいかに人手不足に貢献できるかが使命だと思う」とのことでした。
特に「何も決まってない企業から何をやりたいかあぶりだしていくような作業」、「お客が何をやりたいかを明確にすること」が重要だそうです。「ただロボット化して自動化したいという人が多いけれど、『何をどうしたいのか聞く』ことが重要」だそうです。また、実現可能性を検討するためのフィージビリティスタディのような補助金精度を充実させることが重要だと語りました。
またメーカーのなかには「ロボットセンター」といって実際のロボットを触れる施設を設けるところも増えてきているので、中小企業のみなさんも実際にそれらに出向いて、業務で使うときのイメージを描いてもらうことが一番重要だと語りました。
「WRS2025 モノづくりロボットチャレンジ」の役割

会場の様子
最後に「WRS2025」の役割については、OSX 濵屋氏は前回の成果を踏まえて「競技をきっかけに協業の機会もあったのでよかった。意義の高い競技会だったと思っている」と振り返ったあと、「単に作業を成功させるだけではなく、独創的なアイデアで取り組んでもらえば面白い。結果だけではなく過程も大事。人材育成としては素晴らしい機会だし、キャリアアップの機会としてもいいのかなと思う。単位や卒業要件の一つとなれば学生さんも参加しやすいのではないか」と述べました。「WRS」を通じてロボット導入の難しさがわかってくるので、それを題材に研究を進めることもできるし、よりSI人材を増やしていけたらと考えているとのことでした。
三明機工の久保田氏は「前回の協議内容は社会実装からテーマがかけ離れていた。今回は役立つテーマだと思っている。すごいシステム構成だけが良いわけではない」と述べました。工場見学などを繰り返し、特に日常業務のなかでパートさんたちがやっていることに注目して、箱詰めというタスクを選んだのだそうです。
システム・インテグレーションを競うロボット競技会は他にも「ロボット甲子園」や「ロボットSIリーグ」などがあり、人材育成面では共通する点もあります。SIer協会では学生のときから「システム・インテグレーション」というものが「かっこいいな」と思われるような活動を行っているとのことです。
埼玉大・琴坂氏は「新たにシステムコストを評価軸に入れた。前回大会はロボット企業の技術力を競う課題だった。今回は現場課題の適切な解決策になっているかを評価したい。もちろん高性能で、尖ったシステムも未来志向の技術として評価したい。ロボットは周辺技術を取り込んだ総合技術。SIは研究開発現場でも必要。近未来のマイルストーンになっていければと思っている。人材育成もその動機づけになっていくのではないかと思う」と語りました。
箱詰め競技は決して先端的作業ではありませんが、日常的に人間が行っているシンプルな作業の愚直な繰り返しです。それを自動化し、さらにコスト評価を導入します。それによって、大量や少量ではなく「中量」程度の作業へとロボット利用を拡大しようというのがWRS2025 モノづくりロボットチャレンジ競技の趣旨とのことでした。
愛知県ではロボットを自動車、航空宇宙に次ぐ「第3の産業の柱」に

2025年には愛知県主催のサイドイベント「あいちロボフェス」も開催予定
最後に愛知県経済産業局産業部産業振興課次世代産業室から「World Robot Summit 2025の愛知開催に向けて」と題してアナウンスがありました。愛知県ではロボットを自動車、航空宇宙に次ぐ「第3の産業の柱」にすることを目指します。「WRS2025」のときは合わせて愛知県主催のサイドイベントとして「あいちロボフェス」も開催予定とのことです。
